
-

����ͨ��
����ץס�����Ƽ�
����������
����ͨ��
����ץס�����Ƽ�
����������
�˹������о�Ժ�����μ����ܲ�ҵ�о�Ժ����Ŷ�������������ָ��������������������
�����壺 �� �� С �� ʱ�䣺2023��04��13�� ��Դ��������ѧ�˹������о�Ժ
�༭�Ƽ���
�������գ��廪��ѧ���ܲ�ҵ�о�Ժ����ŶӺͱ�����ѧ�˹������о�Ժ�������Ŷ���ICLR?�������ģ���Ϊ��Understanding Embodied Reference with Touch-Line Transformer�������о�ּ���û�����ѧϰ��Դ�ڴ�����ָ�������ƣ�ʹ�����˸��õغ����ཻ�����������������ཻ��ʱ����������˺���ȷ������ָʲô����Ϊ������ִ�ѧϰ�㷨�������˵�ָ��������ʱ���ܺܺõ�ͬʱ�������ƺ����ԡ�������ǰ�Ĺ��� (Chen et al., 2021) ������...
���գ��廪��ѧ���ܲ�ҵ�о�Ժ����ŶӺͱ�����ѧ�˹������о�Ժ�������Ŷ���ICLR �������ģ���Ϊ��Understanding Embodied Reference with Touch-Line Transformer�������о�ּ���û�����ѧϰ��Դ�ڴ�����ָ�������ƣ�ʹ�����˸��õغ����ཻ����
�������������ཻ��ʱ����������˺���ȷ������ָʲô����Ϊ������ִ�ѧϰ�㷨�������˵�ָ��������ʱ���ܺܺõ�ͬʱ�������ƺ����ԡ�
������ǰ�Ĺ��� (Chen et al., 2021) ���������㷨��ȷ�ؿ����˵����ƺ��˵����ԣ���������Ȼֻ���� 14% �������ȷ��λ��IoU $\ge$ 0.75����ָ�����塣
Ӱ������ģ�ͱ��ֵ�һ�����ܵ�������û�кܺõؽ�ģ�˵�ָ�������ơ��ִ�������Ӿ����������Ʊ�ʾ�� COCO (Lin et al., 2014) ���壺һ���� 17 ���ڵ㣨�ؼ��㣩�� 14 ���ߣ��ؼ������ߣ���ɵ�ͼ��COCO ���������Ʊ�ʾ�����ⲿ�������ߣ����������۾���ָ������ߡ�
��ͼ 1 Ϊ����ʹ�� COCO �������Ʊ�ʾ���Եõ���ɫ���ߣ������ߣ������Dz��ܵõ���ɫ���ߣ������ߣ���
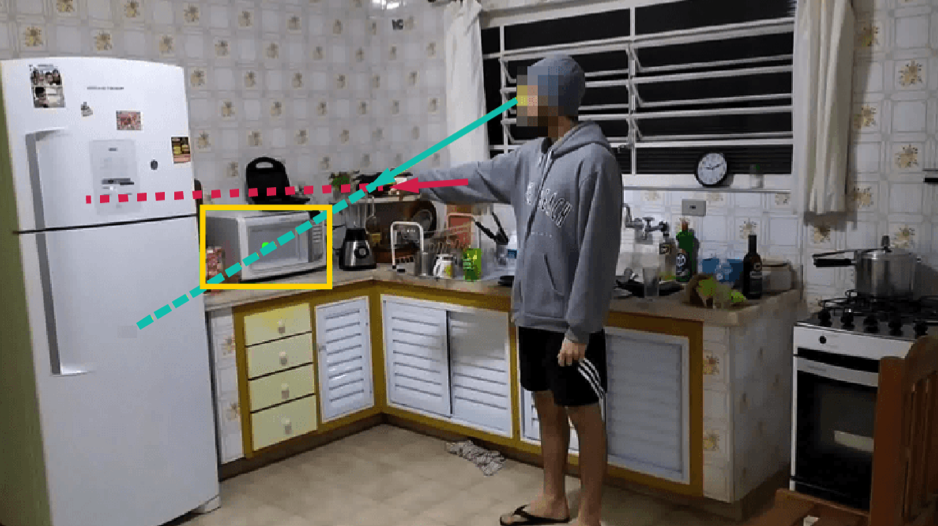
ͼ1.��ָ���壨??������¯���ڴ����ߣ���?���ϣ�
���������ߣ���?���ϡ�
�����ָ�������ƴ���һ����������� (Herbort & Kunde, 2018)�������˴������Ϊ��ָ�������ں�ɫ���������ϡ���ͼ 1 Ϊ���������˻�����������ɫ������������λ��ָ�����壬�Ӷ��������Ϊ��ָ�������DZ��䡣
ʹ�ú�ɫ������������λ��ָ�����Ǵ���ġ�
���������Ĺ۲죬���Ƿ�����ɫ�����������۾���ָ������ߣ��ܹ����õر�ʾ��ָ����ķ�����ͼ 1 �е���ʵ��ָ�������ǻ�ɫ���е���¯����Ϊ��ָ��ͬʱ˵������¯������ͼ�е���ɫ�Ĵ����ߴ�������¯�����ģ���ȷ�ر�ʾ����ָ����ķ�����ˣ�ʹ�ô����߿��������Ǹ�ȷ�ض�λ��ָ�����塣
������ Science Advances ��һ������ѧ�о� (O��Madagain et al., 2019) �ܺõ���֤���������������ܰ����Ǹ�ȷ��λ��ָ������һ�۵㡣������ѧ�о����ִ������ܸ�ȷ�ط�ӳ��ָ����ķ�������������ǵ���ָ��������Դ�ڴ�������
�ܵ������߱������߸�ȷ��һ�����۲������������ϣ���û�����ѧϰ�����Դ�ڴ�����ָ�����������Ӷ����õ������ཻ������ˣ������������۾���ָ�⣬�Ӷ����������е� COCO �������Ʊ�ʾ�����ǵ�ʵ����������ģ��ѧϰ�������ܹ����������������ָ��������ʱ��ȷ�ԡ�
Ϊ�ˣ����Ĺ�����һ��������ģ̬�������� Transformer �������Ŀ�ܡ�ʹ���������ƶ�����������ʹ�����֮��Ĺ����ԡ���ʹ��һ�� referent alignment loss������ģ��Ԥ����ʹ����߾��нϸ߹����Ե���ָ���塣
�� 0.25��0.50 �� 0.75 �� IoU ��ֵ�£����ǵķ����ֱ��������е����Ƚ����� 16.4%��23.0% �� 25.0% ���� 1���� ������˵�����ǵ�ģ�ͱ�û����ȷ���÷����������źŵ� visual grounding ���� (Yang et al., 2019; 2020) ���ָ��á� ���ǵķ���Ҳ�� YouRefIt (Chen et al., 2021) ������ķ������ָ��ã�����û�����ô����� transformer ģ������ɶ�ģ̬����

�� 1: �� state-of-the-art ?����?�ϡ�
ͬʱ�����DZȽ�����ģ����ȷԤ�ⴥ���ߡ���ȷԤ�������ߡ��Ͳ�Ԥ���κ������źŵ�����ģ�͵ı��֡��ܵ���˵������������ IoU ��ֵ�£�ѵ����Ԥ�ⴥ���ߵ�ģ�ͱ�ѵ����Ԥ�������ߵ�ģ�ͱ��ָ��� ���� 2���� �� 0.75 �� IoU ��ֵ�£�����ѵ��������ȷԤ�������ߵ�ģ�ͱ�û�о���ѵ��������ȷԤ���κ������źŵ�ģ�ͱ��ָ��
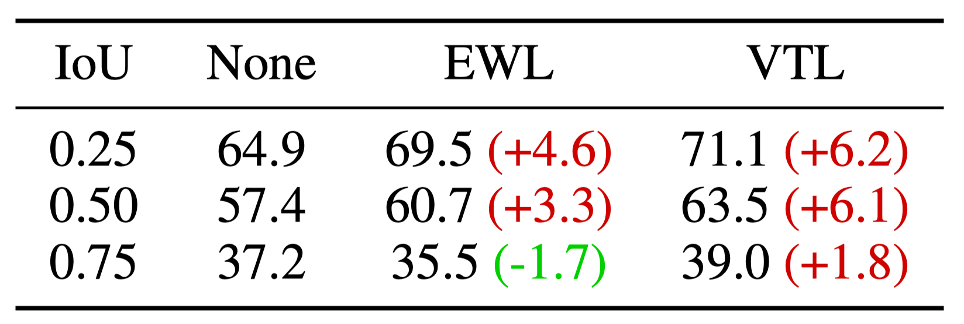
��2:Ԥ�ⴥ���ߵ�ģ�ͺ�Ԥ��������ģ�͵ıȽϡ�
��None������ȷԤ�ⴥ���������ߣ�EWL����ȷԤ�������ߣ�VTL����ȷԤ�ⴥ���ߣ�
���ǵĶ��Խ��Ҳ��ʾѧϰԤ�ⴥ���ߵ�ģ���ںܶ�����±�ѧϰԤ�������ߵ�ģ�ͱ��ָ��ã�ͼ 2����
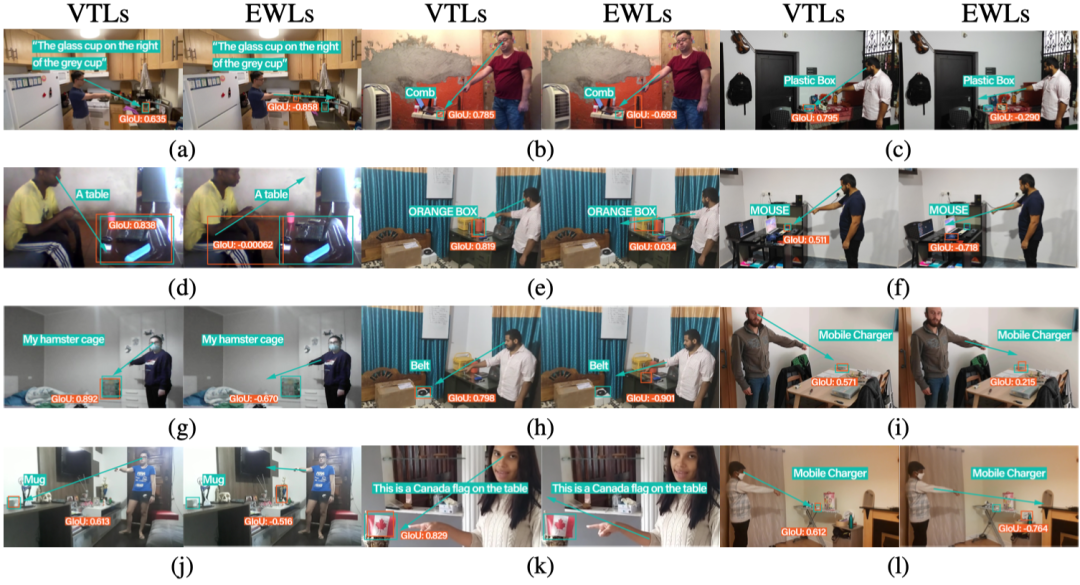
ͼ 2: ���Խ����ѧϰԤ�ⴥ���ߵ�ģ���ںܶ�����±��ָ���
��������ü���ģ��ѧϰ�����ߴӶ����õ����������ָ�������ơ����ǵ�ģ�ͽ��Ӿ����ı�������Ϊ���룬ͬʱԤ��ָʾ����ı߽��ʹ��������������ô��������飬���ǽ�һ�������һ�ּ���һ������ʧ������������ָ����ʹ�����֮��Ĺ����ԡ�ѧϰ�����߿����������ģ�����ܡ��� YouRefIt ���ݼ��Ͻ��е�ʵ����������ǵķ����� 0.75 IoU ����ʵ���� +25.0% �ľ�����������С�˼���ģ�����������֮�� 63.6% �IJ�ࡣ���⣬����ͨ������ģ����֤�˴�ǰ������ʵ��Ľ��������֤���˼���ģ����ѧϰ������ʱ��ѧϰ������ʱ�ܸ��õض�λ��ָ���塣
��������Ϊ�������廪��ѧ���ܲ�ҵ�о�Ժ������Сѩ���廪��ѧ���ܲ�ҵ�о�Ժ������껣��廪��ѧ���ܲ�ҵ�о�Ժ���������Σ��廪��ѧ���ܲ�ҵ�о�Ժ�����ܹ�Խ���廪��ѧ���ܲ�ҵ�о�Ժ����Federico Rossano�����ݴ�ѧʥ���Ǹ��У���������Σ�������ѧ�˹������о�Ժ����
�����
1. Yixin Chen, Qing Li, Deqian Kong, Yik Lun Kei, Song-Chun Zhu, Tao Gao, Yixin Zhu, and Siyuan Huang. Youre?t: Embodied reference understanding with language and gesture. In Proceedings of the IEEE/CVF International Conference on Computer Vision, pp. 1385�C1395, 2021. 1, 2, 5, 6, 9, 10
2. Tsung-Yi Lin, Michael Maire, Serge Belongie, James Hays, Pietro Perona, Deva Ramanan, Piotr Doll��r, and C Lawrence Zitnick. Microsoft coco: Common objects in context. In European Conference on Computer Vision (ECCV), 2014. 2
3. Oliver Herbort and Wilfried Kunde. How to point and to interpret pointing gestures? instructions can reduce pointer�Cobserver misunderstandings. Psychological Research, 82(2):395�C406, 2018. 2, 3
4. Cathal O��Madagain, Gregor Kachel, and Brent Strickland. The origin of pointing: Evidence for the touch hypothesis. Science Advances, 5(7):eaav2558, 2019. 2
5. Zhengyuan Yang, Boqing Gong, Liwei Wang, Wenbing Huang, Dong Yu, and Jiebo Luo. A fast and accurate one-stage approach to visual grounding. In International Conference on Computer Vision (ICCV), 2019. 6, 10
6. Zhengyuan Yang, Tianlang Chen, Liwei Wang, and Jiebo Luo. Improving one-stage visual grounding by recursive sub-query construction. In European Conference on Computer Vision (ECCV), 2020. 6, 10
����ͨ�Ź��ں�
֪����ҵ��Ƹ

